野火开源平衡车官网板块
https://www.firebbs.cn/forum.php?mod=forumdisplay&fid=129&page=1
参考资料
暂无
参考视频(这个群主讲的不错)
https://www.bilibili.com/video/BV1j7411z7uX
硬件平台

开发平台
KEIL5, STM32F103X主控,程序用的SWD下载(啥下载器都行,能下载进去就好,用串口下载也是可以的)
开发(一)
P 比例: 提高响应速度,减小静态误差(因为EP值比EI,ED都要大,值大贡献的值就大,太大直接跑扑街,太小会一直达不到设定点)
(静态误差指 理想值 与真实值 之差, 比例过大,会导致系统振荡,但你想达到目标值,必须围绕这目标值振荡,然后通过其他I,D来逐渐减小振荡幅度, 但你太大他直接振没了(不受ID控制了))
I 积分: 消除稳态误差 (积分是累加, 求面积, 主要是积累误差)
有一丁点误差,都会因为累加,变得很大, 直到你的误差消除为0
D 微分:减小振荡,以及超调(微分就是求导, 导数就是变化率)
微分越大,阻力就越大, 就越削弱之前的EP比例(也可能含有EI积分值)的幅度值
有网友总结到
比例是考虑当前,积分是回顾历史(累计误差),微分是预测未来
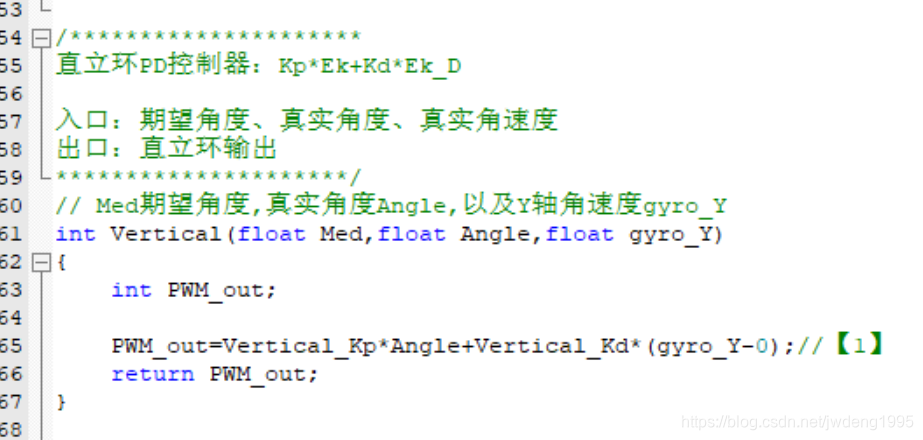
直立环 让小车角度趋近0,小车正立住(PD:比例微分控制)
直立环: 输入(1.给定的角度.2角度的反馈), 输出(PWM直接控制车车)
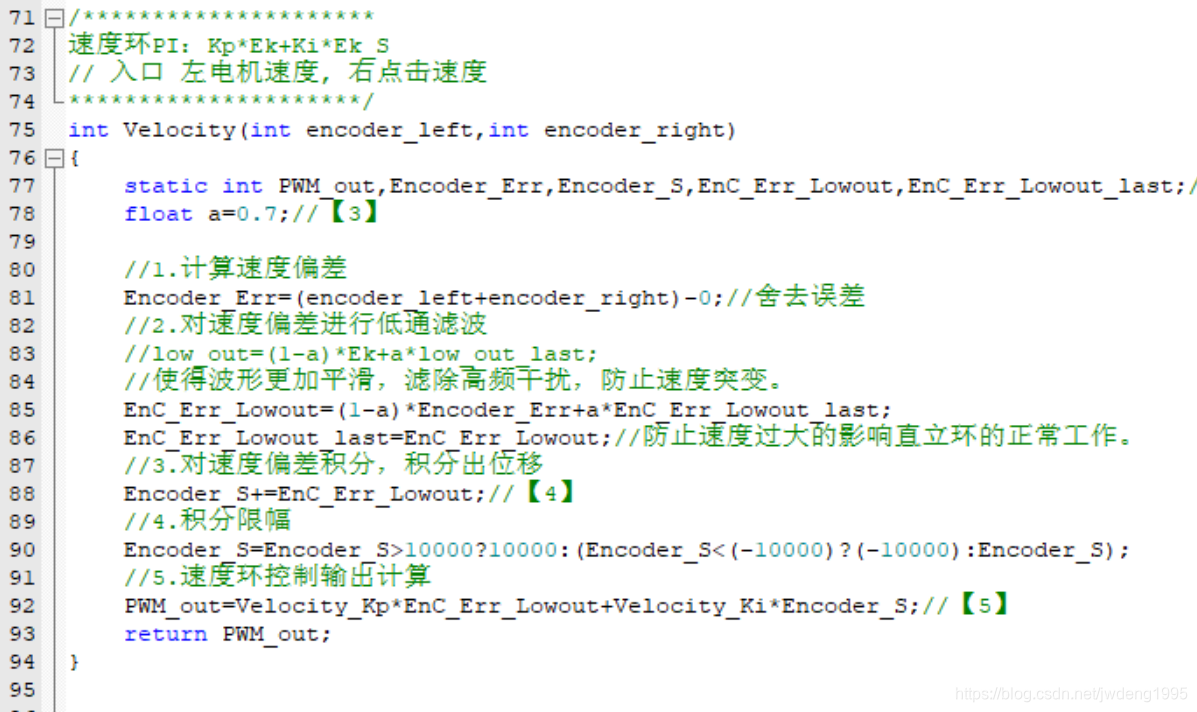
速度环, 让电机速度趋近0,电机不转(PI:比例积分控制)
速度环: 输入(1.给定的速度. 2速度的反馈) , 输出(角度值,直立环的期望速度输入)
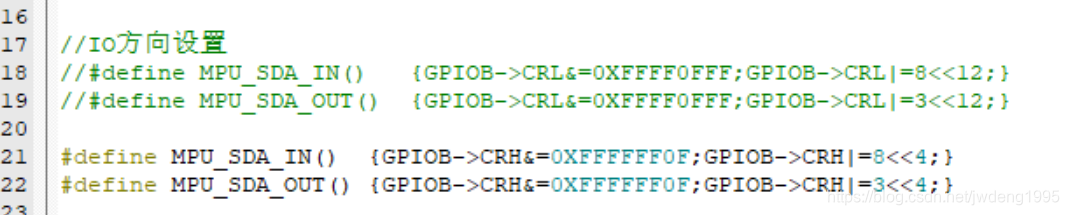
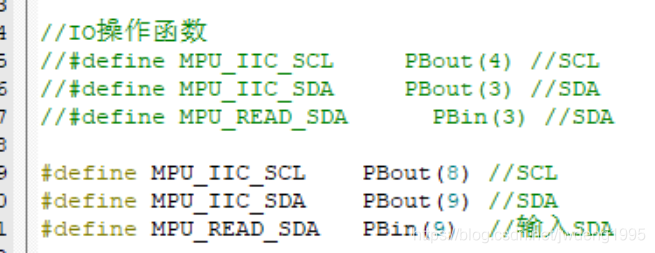
先搞MPU6050
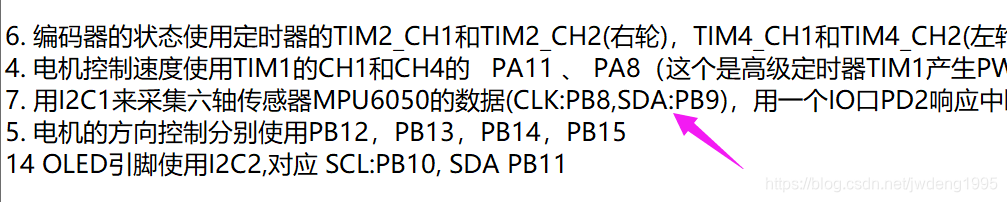

用到了PB8和9
 \
\
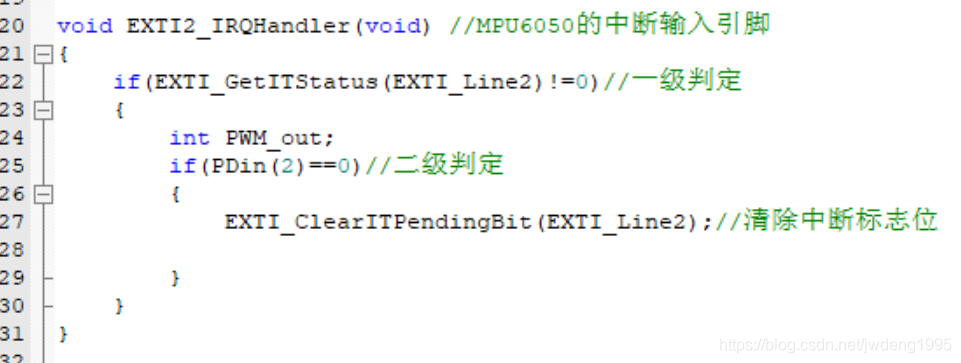
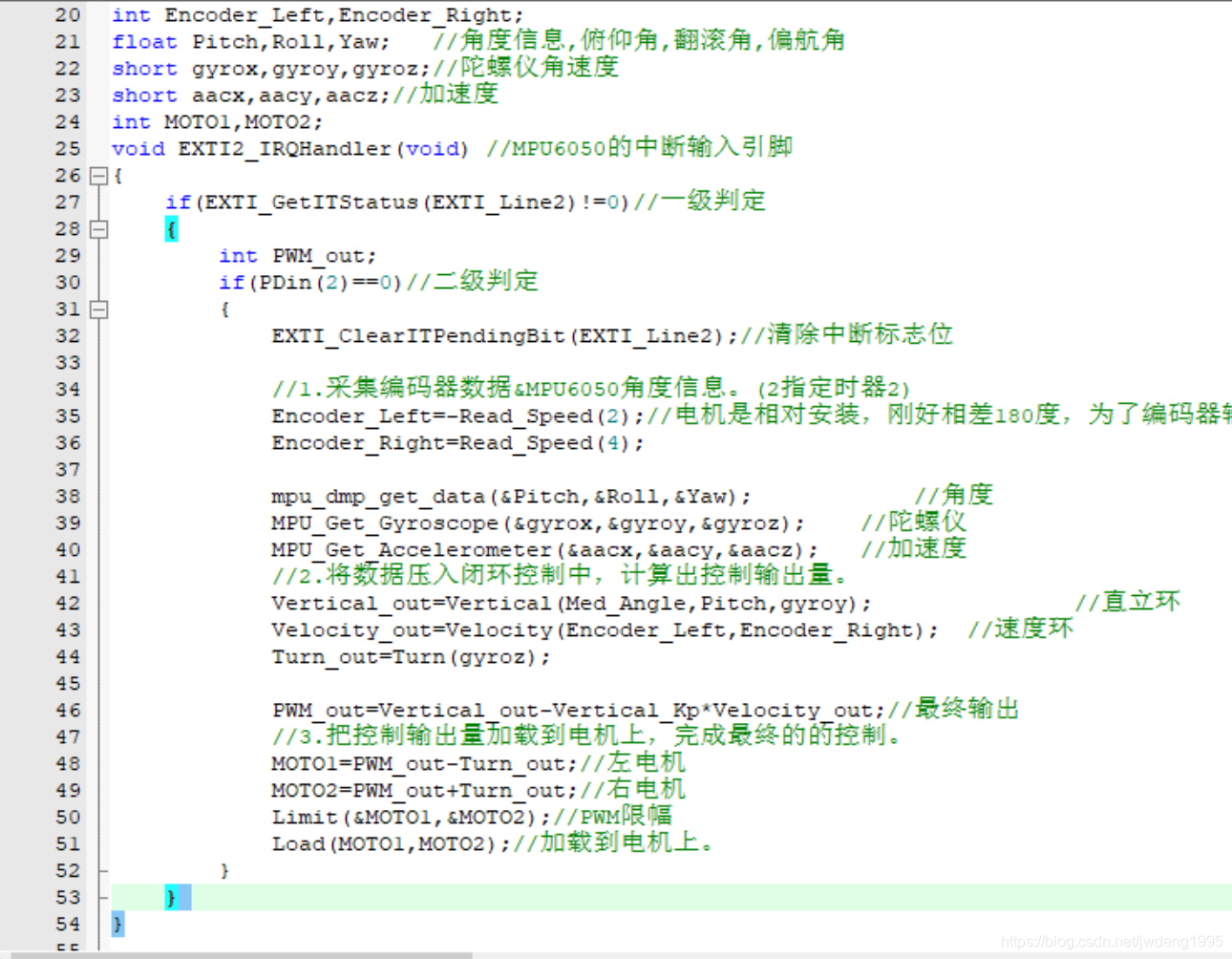
MPU6050这边设置中断的频率为50HZ,(10ms中断一次 更新电机PWM)


处理下 MPU6050 10ms来一次的中断(我们用的是PD2)
直立环PD控制
速度环 PI控制
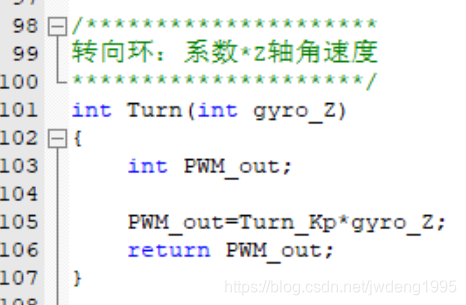
转向环 在直立的时候 约束车车的转向
继续编写10ms的MPU6050中断内容
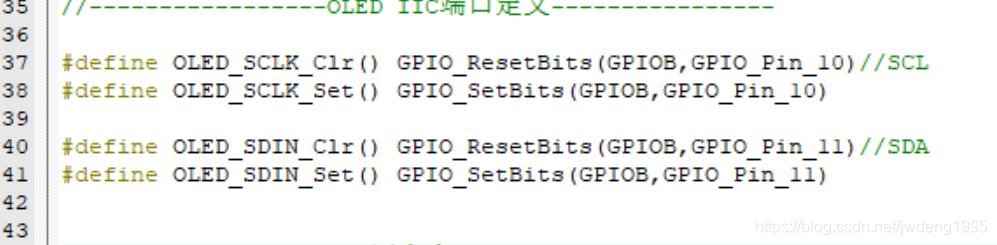
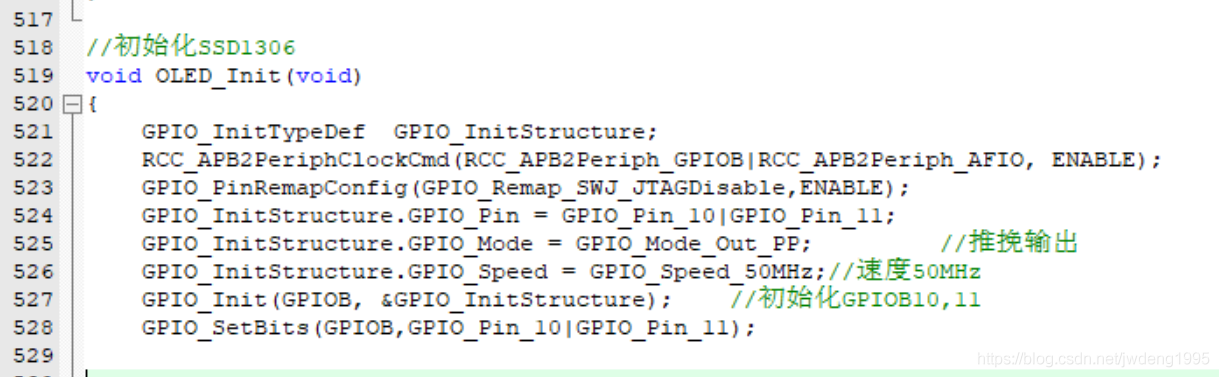
下面改以下OLED引脚 PB10和PB11

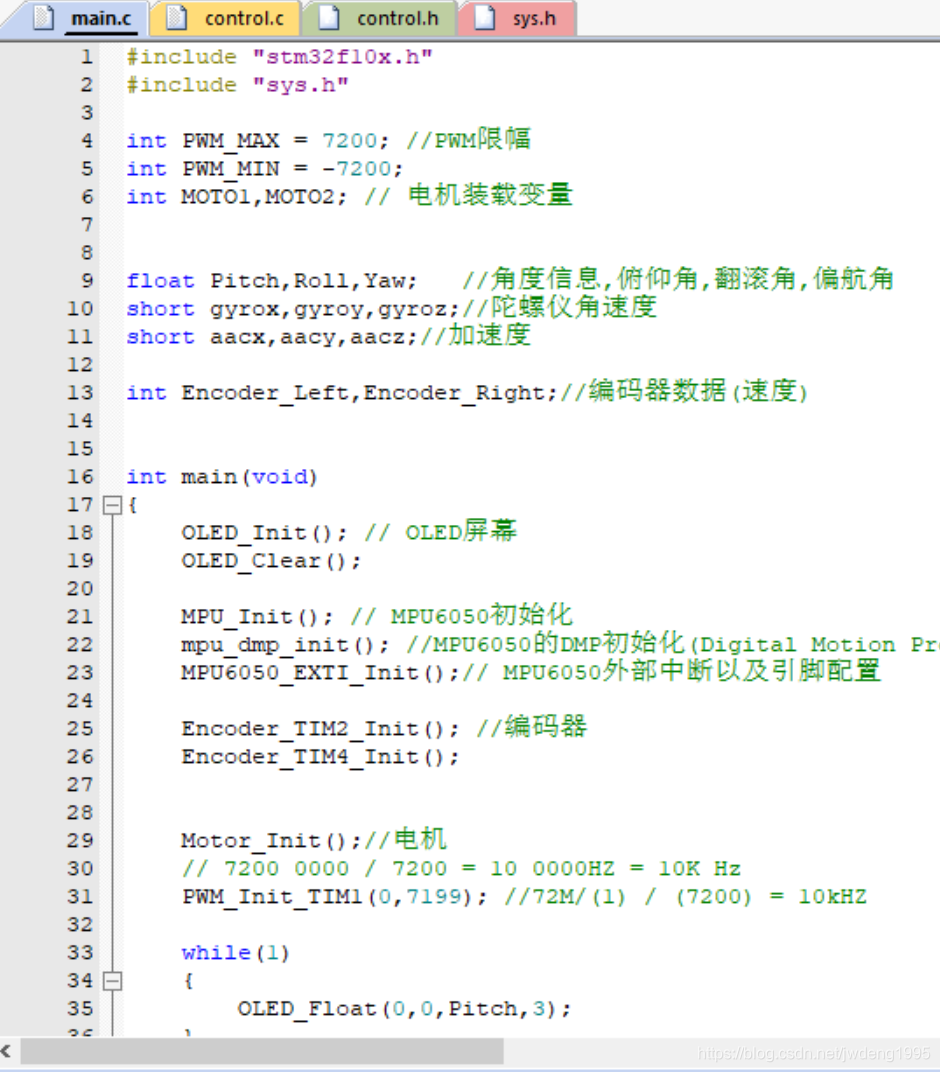
编写主函数




 发表于 2020-8-23 16:56:43
发表于 2020-8-23 16:56:43
 提升卡
提升卡